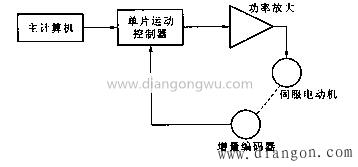
运动控制器通常是以微处理器为核心,由计算机编程、运动轨迹设计,向伺服电动机或步进电动机发出运动指令,实现被控制对象的位置、速度、加速度控制。运动控制器可分为“箱式”、“卡式”和“单片”三个层次。这里介绍的是单片大规模集成电路的运动控制器。实际上,它是一种专用微控制器。如图所示,它们从主计算机接收控制指令,从伺服电动机的增量编码器读取位置信息,向伺服电动机功率驱动电路输出运动指令。对于伺服电动机位置闭环系统来说,它们主要是完成了位置环的作用,可称为数字伺服运动控制器。它们适用于直流伺服电动机、无刷直流伺服电动机和步进电动机的闭环伺服控制。而GL—1200步进伺服控制器则将一个直流伺服电动机闭环控制转换成类似对一台步进电动机开环控制一样,使主控制器的控制算法得以简化。