增量式角度数字编码器的工作原理:

(图片文字依次为:光源、码盘、光敏元件、放大整形、脉冲输出)
在一个码盘的边缘上开有相等角度的缝隙(分为透明和不透明部分),在开缝码盘两边分别安装光源及光敏元件。当码盘随工作轴一起转动时,每转过一个缝隙就产生一次光线的明暗变化,再经整形放大,可以得到一定幅值和功率的电脉冲输出信号,脉冲数就等于转过的缝隙数。将该脉冲信号送到计数器中去进行计数,从测得的数码数就能知道码盘转过的角度。
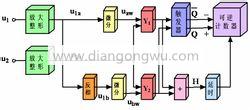
为了判断旋转方向 ,可以采用两套光电转换装置。令它们在空间的相对位置有一定的关系,从而保证它们产生的信号在 相位上相差1/4周期。
增量型编码器通过内部两个光敏接受管将编码器的转向转化为A相和B相脉冲的时序和相位关系。编码器每转还输出一个Z相脉冲以代表零位参考位。
如图所示,A、B 两点对应两个光敏接受管,A、B 两点间距为 S2,编码器的光栅间距分别为S0 和S1。

当编码器以某个速度匀速转动时,输出波形中的S0:S1:S2 比值与实际编码器的S0:S1:S2相同。如果编码器做变速运动,可以把它看成为多个运动周期的组合,那么每个运动周期输出波形的S0:S1:S2 比值与实际编码器的S0:S1:S2仍相同。
通过输出波形可知每个运动周期的时序为

我们把当前的A,B 输出值保存下来,与下一个A,B 输出值做比较,就可以得出编码器的运动方向。用编码器运动角位移除以所消耗的时间,就得到编码器运动的角速度。
如果S0=S1,且S2=S0/2,1/4个运动周期就可以得到运动方向和位移角度,否则要1个运动周期才可以得到运动方向和位移角度。
综上可知,可以通过判断A相和B相的相位关系来判断编码器的正反转,通过Z相脉冲获得零位参考位。
关于增量型编码器的一些技术参数如下:
分辨率:编码器每转提供的通或暗的刻线数叫分辨率,也称解析分度或直接称多少线。一般每转分度5~10000线。
信号输出:信号输出形式有正弦波(电流或电压)、方波(TTL/HTL)等多种。其中TTL方波的形式为长线差分信号(对称A+、A-;B+、B-;Z+、Z-)。
信号连接:编码器的脉冲信号一般连接计数器、plc、计算机。形式有单相连接(用于单方向测速、计数);AB两相连接(用于双向测速、计数及判断方向);ABZ三相连接(用于带参考位修正的位置测量);差分连接(用于远距离传输)。
增量型编码器在角度测量和角速度测量中较绝对型编码器具有廉价和简易的优点。但存在抗干扰能力较差、有零点累计误差、接受设备停机需断电记忆,开机需找参考位等问题。一般应用在测速、测转动方向、测移动角度、测相对距离等方面。