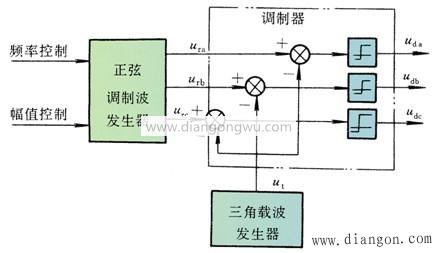
图1 鉴幅型直流伺服系统的原理框图
1、位置检测与信号综合环节
(1)旋转变压器:是一种输出电压随转角变化的角位移测量装置。
(2)相敏放大器:将交流电压转换为与之成正比的直流电压,并使它的极性与输入的交流电压的相位相适应。
(3)位置检测与信号综合环节
2、脉宽调制型(PWM)功率放大
基本原理:利用大功率电器的开关作用,将直流电压转换成一定频率的方波电压,通过对方脉冲宽度的控制,改变输出电压的平均值。
(1)PWM变换器
图2 脉宽调速示意图
 (4-1)
(4-1)
(2)双极型PWM变换器
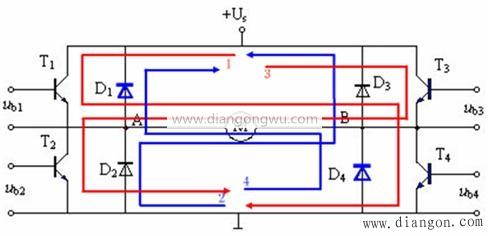
图3 双极式H型可逆PWM变换器电路
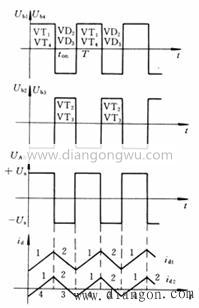
图4 双极式PWM变换器电压和电流波形
根据图很容易导出双极式可逆PWM变换器电枢两端平均电压的表达式
![]()
(4-2)
双极式PWM变换器特点:
优点:
①电流连续;
②可使电动机在四个象限中运行;
③电动机停止时,有微振电流,能消除摩擦死区;
④低速时,每个晶体管的驱动脉冲仍较宽,有个晶体管的可靠导通;
⑤低速时平稳性好,调速范围宽。
缺点:
在工作过程中,四个功率晶体管都处于开关状态,开关损耗大,且容易发生上、下两管直通的事故。为了防止上、下两管同时导通,在一管关断和另一管导通的驱动脉冲之间,应设置逻辑延时。
直流伺服系统的稳态误差分析
影响伺服系统的稳态精度,导致系统产生稳态误差的因素有以下几个方面:由检测元件引起的检测误差;由系统的结构和输入信号引起的原理误差;负载扰动引起的扰动误差。
1.检测误差
2.原理误差
3.扰动误差
直流伺服系统的动态校正
方法:
1、速度调节器的设计。
2、位置调节器的设计。