我们知道伺服电机回零是为了校正消除位置偏移,同时也是因为此系列的plc在断电后脉冲的特殊数据寄存器清零位置信息丢失。在三菱的fx3g系列的plc中有专门的机械原点回归指令DSZR和ZRN指令来完成。零位的地方可以设置在移动方向的左边、右边,也可以设置在中间部位。那么我们根据零位的位置选择回零方法。
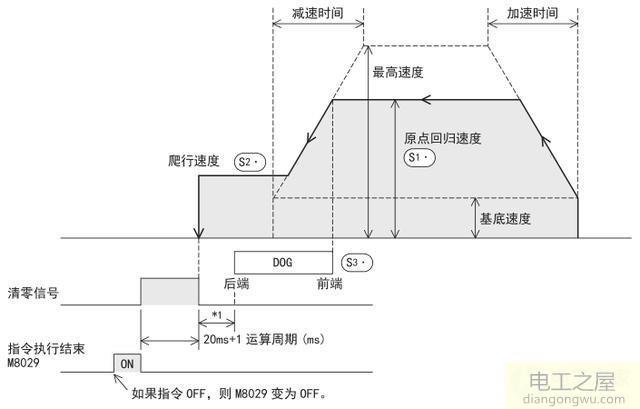
1零位位于左边,这种放置方式,伺服电机运动的方法基本在原点和右极限的区别运行,简单的回零方式就是直接向左移动,使用plc发出一个慢速的反转信号即可(本文中正转表示右移,反转表示左移),只到感应到原点信号立刻停止,同时对脉冲寄存器D8340清零。还有就是采用ZRN的指令,可设置原点回归速度、爬行速度和DOG(近点信号),相比于上面的回零方法,它具有两个速度,可快速完成回零,运动逻辑过程如下图所示,这里所谓的近点信号就是原点,它的回零过程首先是以回归速度向左移动,检测到原点信号的前端(OFF→ON)开始减速并减速到爬行速度并不停止继续左移直到检测到原点信号的后端(ON→OFF)则立即停止,同时清零。这里需要注意这个速度一定计算合适,接点信号选择为X0~X7则通过中断处理,X10以后则停止受到plc运算周期影响。考虑有足够为ON的时间能充分减速到爬行速度,零位爬行速度不能设置过高,会由于惯性导致停止位置偏移。
2零位位于右边,方法与位于左边的产不多,在使用ZRN指令时需注意改变伺服移动方向的信号。
3零位位于中间部位,位与中间部位的情况要复杂一点,因为你不知道此时电机的位置在哪个方向是该左移还是右移,plc断电重启后D8340是0。因此我们可以控制伺服电机先向左移动,如果检测到中原点则停止,如果检测到左极限则换向右移动只到检测到原点信号停止。这样无论电机是在原点左边还是右边都能回到中原点。这里采用ZRN指令则很不方便,可以使用DSZR指令完成回零,它的运动过程如下:
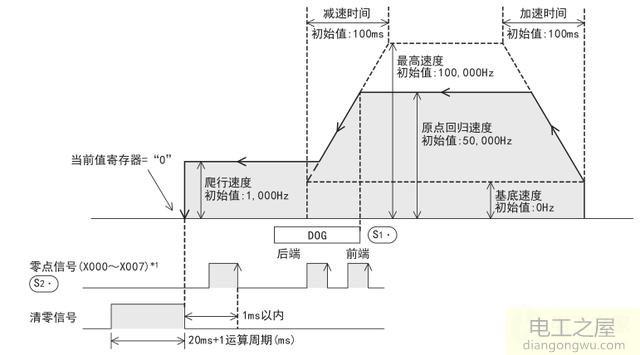
相比于ZRN它多了一个零点信号也就是原点,旋转方向根据当前寄存器自动切换,同时具有DOG搜索功能,有四种开始情况,开始位置位于DOG前、在DOG内、在通过DOG后、在极限位置的时候,会自动根据位置进行相应的回零路径。

以上就是fx3g的plc控制伺服电机回零的情况和对应的方法