伺服电动机驱动电路的工作流程图
1.采用STK6217芯片的伺服电动机驱动电路的结构
图1所示是采用STK6217芯片的伺服电动机驱动电路的结构。电动机采用直流电动机,可实现宽范围的稳速控制。在电动机上设有速度信号产生器(FG),用以检测电动机旋转的速度。该系统需要两种电源一种是为电动机绕组供电的电源(+24V),最高供电电压可达52V另一种电源是+5V,这种电源是为芯片内小信号处理电路提供电压的。
该电路的同步频率为2000Hz,基准晶体振荡信号频率为8.2MHz,可变分频器的分频数为1/2。
2.伺服电动机驱动电路的工作过程
图2所示是伺服电动机驱动电路的工作流程图。伺服电动机驱动系统的启动开关接在芯片STK6217的27脚(见图5-20),当开关接通时,21脚为低电平,驱动电路启动,电动机开始旋转。于是与电动机同步转动的速度信号产生器便输出与电动机转速成正比 的频率信号,该信号由10脚送到锁相环控制电路,在锁相环控制电路中与基准信号进行比较,经过比较后产生速度误差信号,即频率误差(FO),同时产生相位误差信号(PO), 这两种误差信号经控制电路后合成为一个误差信号,该信号经pwM变换电路变成驱动直流电动机的电压去驱动电动机旋转,当电动机旋转接近标准速度时,其误差信号就会减小。整个系统构成一个自动控制环路,控制的结果,是使电动机的转速在所要求的范围内。
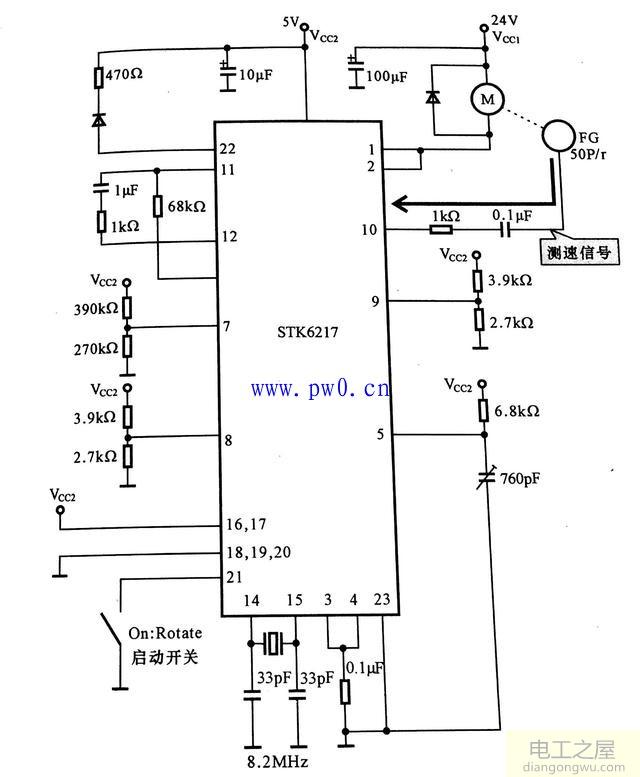
图1
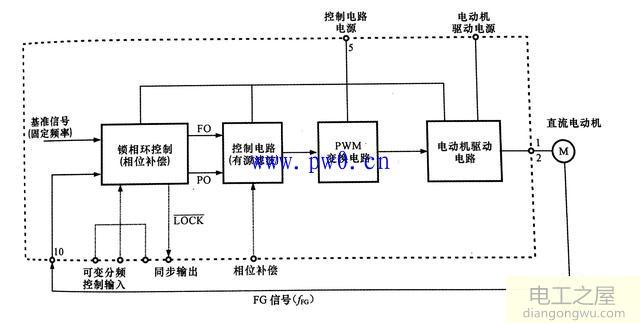
图2