伺服电动机控制原理图解
如下图所示是一种采用功率运算放大器LM675制成的伺服电动机控制电路,电动机采用直流伺服电动机。从图可见,功率运算放大器LM675由15V供电,15V电压经RP 1加到运算放大器LM675的同相输入端,LM675的输出电压加到伺服电动机的输入端。电动机上装有测速信号产生器,用于实时检测电动机的转速。实际上测速信号产生器是一种发电机,它输出的电压与转速成正比。测速信号产生器G输出的电压经分压电路后作为速度误差信号反馈到运算放大器的反相输入端。速度指令电位器RP1设定的电压值经R1.R2分压后加到运算放大器的同相输入端,相当于基准电压。
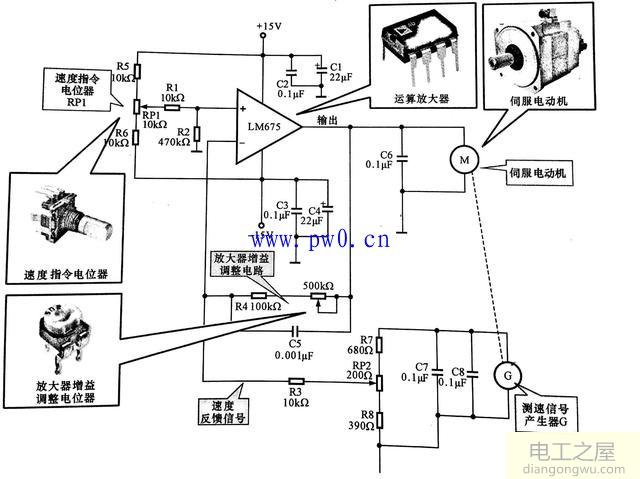
伺服电动机的控制原理图
伺服电动机用字母M表示伺服电动机,是驱动系统的动力之源。
运算放大器:用电路名称表示,即LM675,是伺服控制电路中的放大器件,为伺服电
动机提供驱动电流。
速度指令电位器RP1:在电路中设定运算放大器的基准电压,即速度设定。
放大器增益调整电位器RP2:在电路中分别用于微调放大器的增益和速度反馈信号的大小。
当电动机的负载发生变动时,反馈到运算放大器反相输入端的电压也会发生变化,即电
动机负载加重时,速度会降低,测速信号产生器的输出电压也会降低,使运算放大器反相输入端的电压降低,该电压与基准电压之差增加,运算放大器的输出电压增加。反之,当负载变小、电动机速度增加时,测速信号产生器的输出电压上升,加到运算放大器反相输入端的反馈电压增加,该电压与基准电压之差减小,运算放大器的输出电压下降,会使电动机的速度随之下降,从而使转速能自动稳定在设定值。